首页 >> 要闻 > AI >
机器看世界更像人类
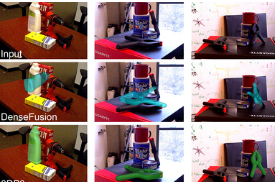
计算机视觉系统有时会对与常识相悖的场景进行推断。例如,如果机器人正在处理餐桌的场景,它可能会完全忽略任何人类观察者都可以看到的碗,估计盘子漂浮在桌子上方,或者误认为叉子正在穿透碗而不是靠着它。
将该计算机视觉系统转移到自动驾驶汽车上,风险会变得更高——例如,此类系统未能检测到紧急车辆和过马路的行人。
为了克服这些错误,麻省理工学院的研究人员开发了一个框架,可以帮助机器像人类一样看待世界。他们用于分析场景的新人工智能系统学习仅从几张图像中感知真实世界的对象,并根据这些学习到的对象感知场景。
研究人员使用概率编程构建了该框架,这是一种人工智能方法,使系统能够根据输入数据交叉检查检测到的对象,以查看从相机记录的图像是否可能与任何候选场景匹配。概率推理允许系统推断不匹配是否可能是由于噪声或场景解释中的错误导致的,需要通过进一步处理来纠正。
这种常识性的保护措施使系统能够检测并纠正许多困扰“深度学习”方法的错误,这些方法也已用于计算机视觉。概率编程还可以推断场景中对象之间可能的接触关系,并使用关于这些接触的常识推理来推断对象的更准确位置。
“如果你不知道接触关系,那么你可以说一个物体漂浮在桌子上方——这将是一个有效的解释。作为人类,我们很明显这在物理上是不现实的,放在桌子顶部的物体更可能是物体的姿势。因为我们的推理系统知道这种知识,所以它可以推断出更准确的姿势。这是这项工作的一个关键见解,”主要作者 Nishad Gothoskar 说,他是概率计算项目的电气工程和计算机科学 (EECS) 博士生。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
相关阅读
最新文章
-
骐蔚汽车试驾,轻松搞定试驾流程。只需几步,即可开启您的专属体验。首先,访问官网或前往线下门店,填写基本...浏览全文>>
-
预约试驾福特锐界L的流程如下:1 访问官网或App:进入福特中国官网或“FordPass”官方APP,找到“试驾预约...浏览全文>>
-
北汽瑞翔试驾流程主要包括以下几个步骤:首先,客户到店后由销售顾问接待,了解客户需求并推荐合适车型。随后...浏览全文>>
-
试驾深蓝S05,线上+线下操作指南:线上预约可通过深蓝官网或官方App填写信息,选择门店与时间,提交后即可收到...浏览全文>>
-
中国重汽试驾预约,流程简单便捷,轻松开启您的驾驶体验。首先,访问中国重汽官网或关注官方公众号,进入“试...浏览全文>>
-
预约红旗试驾通常需要满足以下条件:首先,您需要年满18周岁并持有有效的中国驾驶证。这是最基本的条件,因为...浏览全文>>
-
MINI试驾:线上+线下操作指南MINI试驾体验是了解这款经典车型的最佳方式。无论是线上预约还是线下体验,都需提...浏览全文>>
-
想要体验理想L6的魅力?只需几个简单步骤即可轻松预约试驾!首先,打开理想汽车官网或下载官方App,注册并登录...浏览全文>>
-
睿蓝汽车,为您带来一场奢华与科技交织的试驾之旅。无论您是追求速度与激情的驾驶爱好者,还是注重舒适与品质...浏览全文>>
-
金龙汽车作为国内知名的客车品牌,其试驾体验备受关注。对于新手来说,预约试驾是一次了解车辆性能的好机会,...浏览全文>>
大家爱看
频道推荐
站长推荐
- 睿蓝汽车预约试驾,新手必知的详细步骤
- 小鹏G7试驾,新手必知的详细步骤
- 五菱星光试驾,开启完美驾驭之旅
- 伊兰特试驾,感受豪华与科技的完美融合
- 道郎格试驾,感受豪华与科技的完美融合
- 奇瑞新能源预约试驾,新手必知的详细步骤
- 万象汽车试驾,轻松开启试驾之旅
- 上汽大通MAXUS预约试驾操作指南
- 试驾红旗HS3 PHEV,新手必看的详细流程
- 特斯拉Model Y试驾预约,从预约到试驾的完美旅程
- 阜阳帕萨特多少钱 2025款落地价,各配置车型售价全解析
- 试驾雷克萨斯ES如何快速锁定试驾名额?
- 阜阳ID.4 CROZZ多少钱?选车指南与落地价全解析
- 君越试驾流程讲解
- 试驾世家,快速上手,开启豪华体验
- 莲花跑车试驾预约操作指南
- 东风风行试驾,如何快速预约并体验驾驶乐趣?
- 池州途观X新车报价2024款,最低售价25.08万起,购车攻略来了
- 安徽安庆途观L多少钱?购车攻略全解析
- 安庆ID.4 X新车报价2025款与配置的完美平衡