福特试用四足机器人以侦察工厂 节省时间和金钱
这些四足狗状机器人可以坐下,握手和翻身。他们还可以执行360度摄像头扫描,处理30度坡度并一次爬楼梯数小时。
那是因为它们实际上是30公斤重的四足机器人,具有类似于狗的移动性。它们是福特制造试点计划的一部分,该计划旨在节省时间,降低成本并提高效率。
Fluffy是机器人处理程序Paula Wiebelhaus的名字,是福特从Boston Dynamics租赁的两种模型之一,该模型以制造复杂的移动机器人而闻名。(另一个福特机器人以产品的实际名称命名为Spot。)
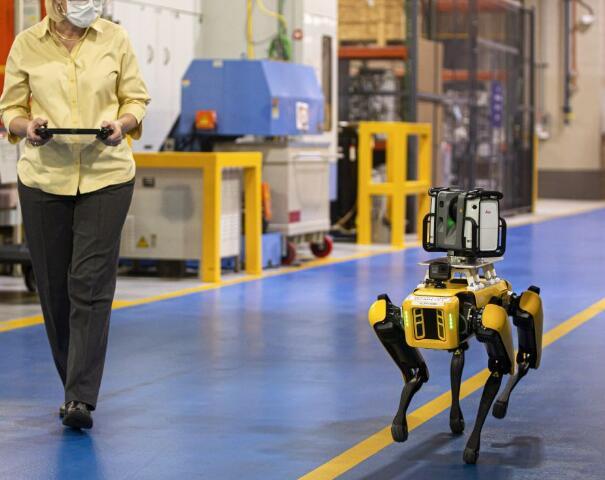
福特在范戴克变速箱工厂试行的机器人为亮黄色,易于识别。配备五个摄像头的机器人可以使用电池以高达4.8kph的速度运行,持续近两个小时,并将被用于扫描工厂车间,并协助工程师更新原始的计算机辅助设计,这在我们准备进行重新装配时就可以使用。我们的植物。
“我们设计和建造工厂。之后,这些年来,所做的更改很少得到记录,”福特数字工程经理Mark Goderis说。“通过让机器人扫描我们的设施,我们可以看到现在的实际情况并建立新的工程模型。然后,当我们需要为新产品重新组装工厂时,将使用该数字模型。”
没有Fluffy,更新将更加乏味。
Goderis回忆说:“我们曾经使用三脚架,我们会绕过设施停在不同位置,每次站立约五分钟,等待激光扫描。” 扫描一棵植物可能需要两个星期。在Fluffy的帮助下,我们可以在一半时间内完成它。”
旧的方法也很昂贵-扫描一个设施要花费近30万美元。如果该试点工作奏效,福特的制造团队可以扫描其所有工厂,而费用仅为一小部分。这些最先进的技术有助于公司节省资金并更快地进行设备更新,最终有助于更快地将新车推向市场。
Goderis说,及时的目的是能够远程操作机器人,对机器人进行编程以执行工厂任务,并立即从该国任何地方接收报告。目前,可以对机器人进行编程以遵循特定的路径,并且可以使用开箱即用的平板电脑应用程序在长达50米的距离内进行操作。
Wiebelhaus说,蓬松度和Spot成功的关键在于它们的敏捷性,她通过一种类似于游戏的设备控制她的机器人,该设备使她能够远程查看摄像机的视图。如果发生问题,Wiebelhaus的控制装置具有安全停止装置,可防止其与任何物体碰撞。
机器人具有三个操作步态-步行以保持地面稳定,步态用于不平坦的地形以及特殊的楼梯速度。他们可以将位置从蹲伏改变为伸展,从而可以将其部署到工厂内难以到达的区域。他们可以处理艰难的地形,从gr石到台阶,再到30度倾斜。如果他们跌倒了,他们可以纠正自己。它们与物体保持安全的设定距离,以防止碰撞。
有时,Fluffy会坐在它的机器人腰腿上,然后骑在一个小型圆形自主移动机器人(非正式地称为Scouter)的背面。侦察兵在工厂过道上顺滑地滑动,使Fluffy可以节省电池电量,直到上班时间为止。侦察员可以在扫描和捕获3D点云时自动导航设施,以生成设施的CAD。如果某个区域对于Scouter来说太紧,则Fluffy可以进行救援。
Wiebelhaus说:“您可能不想进入工厂中的某些区域,因为它们可能很难操纵。” “将Fluffy发送回那里更容易,更安全。”
尽管Fluffy完全可以翻转,但Wiebelhaus看不到他的狗表演。
“蓬松是一种了不起的制造工具,”韦伯豪斯说。“是的,这很有趣而且很新,但是Fluffy确实应该因为他的工作和坚韧而受到重视。他可以做的不止是跳舞和翻滚。我们希望将他推到制造工厂的极限,看看他对公司的价值。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
预约红旗试驾通常需要满足以下条件:首先,您需要年满18周岁并持有有效的中国驾驶证。这是最基本的条件,因为...浏览全文>>
-
MINI试驾:线上+线下操作指南MINI试驾体验是了解这款经典车型的最佳方式。无论是线上预约还是线下体验,都需提...浏览全文>>
-
想要体验理想L6的魅力?只需几个简单步骤即可轻松预约试驾!首先,打开理想汽车官网或下载官方App,注册并登录...浏览全文>>
-
睿蓝汽车,为您带来一场奢华与科技交织的试驾之旅。无论您是追求速度与激情的驾驶爱好者,还是注重舒适与品质...浏览全文>>
-
金龙汽车作为国内知名的客车品牌,其试驾体验备受关注。对于新手来说,预约试驾是一次了解车辆性能的好机会,...浏览全文>>
-
哈弗H6试驾操作指南哈弗H6作为一款国产SUV的代表车型,以其高性价比和出色性能深受消费者喜爱。如果您计划进行...浏览全文>>
-
预约睿蓝汽车试驾是体验新能源车型的好机会。以下是新手操作的详细步骤:第一步:访问官方网站或下载官方APP。...浏览全文>>
-
试驾吉利汽车的吉利熊猫是一个了解这款车型性能和功能的好机会。以下是预约试驾的基本流程:第一步:访问官网...浏览全文>>
-
试驾长安CS75是一次令人愉悦的体验。从咨询开始,我便感受到销售人员的专业与热情。他们详细解答了我的疑问,...浏览全文>>
-
长安凯程试驾预约,让您的驾驶体验更加便捷与愉悦。无论您是想感受新车型的强劲动力,还是希望深入了解车辆性...浏览全文>>
- 睿蓝汽车预约试驾,新手必知的详细步骤
- 小鹏G7试驾,新手必知的详细步骤
- 五菱星光试驾,开启完美驾驭之旅
- 伊兰特试驾,感受豪华与科技的完美融合
- 道郎格试驾,感受豪华与科技的完美融合
- 奇瑞新能源预约试驾,新手必知的详细步骤
- 万象汽车试驾,轻松开启试驾之旅
- 上汽大通MAXUS预约试驾操作指南
- 试驾红旗HS3 PHEV,新手必看的详细流程
- 特斯拉Model Y试驾预约,从预约到试驾的完美旅程
- 阜阳帕萨特多少钱 2025款落地价,各配置车型售价全解析
- 试驾雷克萨斯ES如何快速锁定试驾名额?
- 阜阳ID.4 CROZZ多少钱?选车指南与落地价全解析
- 君越试驾流程讲解
- 试驾世家,快速上手,开启豪华体验
- 莲花跑车试驾预约操作指南
- 东风风行试驾,如何快速预约并体验驾驶乐趣?
- 池州途观X新车报价2024款,最低售价25.08万起,购车攻略来了
- 安徽安庆途观L多少钱?购车攻略全解析
- 安庆ID.4 X新车报价2025款与配置的完美平衡